Introduction & Background
>>Control system is the behavior of the system is described by the differential equations. The differential equation may be ordinary differential equation or difference equation.
>>The first significant control device was James Watt's fly-ball governor. It was invented in 1767. the working principle was to keep the speed of the engine constant by regulating the supply of the steam to the engine.
What is open loop control system?

Disadvantages :












>>Control system is the behavior of the system is described by the differential equations. The differential equation may be ordinary differential equation or difference equation.
>>The first significant control device was James Watt's fly-ball governor. It was invented in 1767. the working principle was to keep the speed of the engine constant by regulating the supply of the steam to the engine.
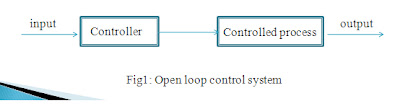
What is open loop control system?
The control system without feedback is called open loop control
system or non feedback control system. In open loop systems the
control action is independent on the desired output.
Examples: Automatic washing machine, Immersion rod, a field control D.C motor.
Advantages of open loop control system
- Open loop control system are simple.
- Open loop control system are economical.
- Less maintenance is required and not difficult.
- Proper calibration is not a problem.
Disadvantages of open loop control system
- Open loop control system are inaccurate.
- These are not reliable.
- These are slow.
- Optimization is not possible
What is close loop control system?
Close loop control systems are known as feedback control system.
In close loop control system the control action is dependent on the
desired output.
Example: Air conditioners provided with thermostat.
Advantages:
- These systems are more reliable.
- Close loop systems are faster.
- A number of variable can be handled simultaneously. Optimization is possible
Disadvantages :
- Close loop systems are expensive.
- Maintenance is difficult.
- Complicated installation
What is transfer function?
Transfer function is defined as the ratio of Laplace transform of the
output to the Laplace transform of input with all initial conditions
are zero.
Consider a open loop control system
R(s) = Laplace transform of input.
C(s)= Laplace transform of output.
G(s)= Transfer function.
Transfer function G(s)=C(S)/R(S)
Characteristics equation of a transfer function
Characteristics equation of a transfer function is
POLES: The poles of G(s) are Those values of ‘s’ which make G(s)
tend to infinity. Above transfer function having simple poles at
s=0,s=-2,double poles at s= -4
ZEROS:The zeros of G(s) are Those values of ‘s’ which make G(s)
tend to Zero. Here the simple Zero at s= -3.
Graphical representation of POLES & ZEROS
Poles are represented by ‘X’ & Zeros are represented by ‘O’.
Now the Pole-Zero plot of the previous transfer function is
Time Response of Control system
Time domain representation of a control system is known as time
response . Time response of a control system is divided into two
parts.
1. Transient response
2. Steady state response Time response of the 1st order system with unit step input
Some definitions of transient response of 2nd order system
DELAY TIME: It is the time required for the response to reach 50% of the final value in first time.
RISE TIME: It is the time required for the response to rise 10% to 90% of its final value for over-damped system and 0 to 100% for under damped system
PEAK TIME: It is the time required for the response to reach the first peak of the time response or first peak overshoot
MAXIMUM OVERSHOOT: It is the normalized difference between the peak of the time response and steady output.
SETTLING TIME: It is the time required for the response to reach and stay within the specified range (2% to 5%) of the final value.
STEADY STATE ERROR: It is the difference between actual
output and desired output as time ‘t’ tends to infinity.







